Q-learning入门例程及Python实现
摘要:Q-learning算法是一种以马尔科夫决策作为理论基础与模型无关的强化学习算法。本文中会描述一个入门级强化学习例程,即房间连通性问题:根据房间的连通性与否及房间出口构建回报矩阵R。并通过python语言利用强化学习算法获得该场景下的评估矩阵Q,最后利用Q矩阵寻找最优路径。
关键词:Q-learning;R矩阵;Q矩阵;最优路径决策
一、从马尔科夫过程到Q学习
标准的马尔科夫决策过程可以用一个五元组\
S是一个离散有界的状态空间;
A是一个离散的动作空间;
P为状态转移概率函数,表示agent在状态s下选取动作a后转移到a’的概率;
R为回报函数,用于计算agent由当前状态 选取动作 后转移到下一状态
得到的立即回报值,由当前状态和选取的动作决定,体现了马尔科夫性的特点;γ是折扣因子,用于确定延迟回报与立即回报的相对比例,
越大表明延迟回报的重要程度越高。
![]()
马尔科夫决策问题的目标是找到一个策略
,使其回报函数的长期累积值的数学期望最大。其中,策略π只和状态相关,与时间无关(静态的)。![]() 是t时刻的环境状态,
是t时刻的环境状态,![]() 是t时刻选择的动作。根据Bellman最优准则,得到最优策略 对应的最优指标为:
是t时刻选择的动作。根据Bellman最优准则,得到最优策略 对应的最优指标为:
![]()
其中,R(s,a)为r(st,at)的数学期望,![]() 为在状态s下选取动作a后转移到下一状态状态s’的概率。由于某些环境中状态之间的转移概率P不容易获得,直接学习
为在状态s下选取动作a后转移到下一状态状态s’的概率。由于某些环境中状态之间的转移概率P不容易获得,直接学习![]() 是很困难的,而Q学习不需要获取转移概率P,因而可用来解决此类具有马尔科夫性的问题。
是很困难的,而Q学习不需要获取转移概率P,因而可用来解决此类具有马尔科夫性的问题。
Q学习是一种与环境无关的算法,是一种基于数值迭代的动态规划方法。定义一个Q函数作为评估函数:
![]()
评估函数Q(s,a)的函数值是从状态s开始选择第一个动作a执行后获得的最大累积回报的折算值,通俗地说,Q值等于立即回报值r(s,a)
加上遵循最优策略的折算值,此时的最优策略可改写为:
![]()
该策略表达式的意义在于:如果agent用Q函数代替![]() 函数,就可以不考虑转移概率P,只考虑当前状态s的所有可供选择的动作a,并从中选出使Q(s,a)最大的动作,即agent对当前状态的部分Q值做出多次反应,便可以选出动作序列,使全局最优化。
函数,就可以不考虑转移概率P,只考虑当前状态s的所有可供选择的动作a,并从中选出使Q(s,a)最大的动作,即agent对当前状态的部分Q值做出多次反应,便可以选出动作序列,使全局最优化。
在Q学习中,agent由初始状态转移到目标状态的过程称为“Episode”,即“场景”。Q函数可以表示为以下的迭代形式进行Q矩阵的更新:
![]()
在每一步的迭代中,上式又可写为:
![]()
即Q矩阵(st,at)位置元素的值等于回报函数R的相应值加上折扣因子γ乘以转换到下一个状态后最大的Q值。
上述的Q学习算法可以看出,当划分的状态有限时,每一场景开始时随机选择的初始状态s在算法的指导下探索环境,最终一定可以到达目标状态s*,回报函数R(s,a)是有界的,并且动作的选择能够使每个状态映射到动作对的访问是无限频率,则整个学习过程就能够训练出来。
Q学习通过对环境的不断探索,积累历史经验,agent通过不断试错来强化自身,最终可以达到自主选择最优动作的目标,即不论出于何种状态,都可给出到达目标状态的最优选择路径,该算法中环境和动作相互影响,动作的选择影响环境状态,环境也可以通过强化回报函数
来反馈动作的优劣性,影响动作的选择。
二、由一个广为流传的小例子了解Q学习的算法逻辑
一个由门连接的建筑物中有五个房间,如下图所示,分别用0-4号标识,将外界看作一个大房间,同样标识为5。
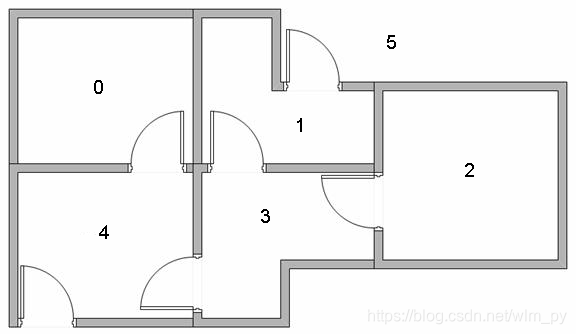
每个房间代表一个节点,门代表连线,可以将上图抽象为下面这样:
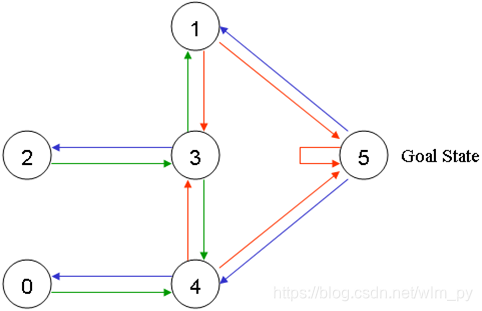
agent会被随机放置在任意一个房间里,然后从那个房间出发,一直走到建筑外(即5号房间为目标房间)。门是双向的,所以相邻节点间是双向箭头连接。通过门可以立即得到奖励值100,通过其他门奖励值为0。将所有箭头标注奖励值如下图:
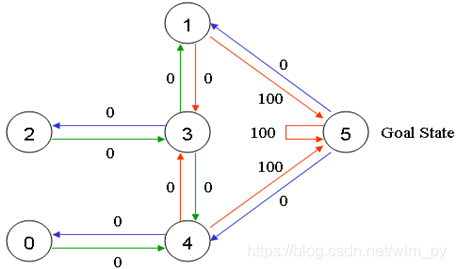
在Q学习中,目标是达到奖励最高的状态,所以如果agent到达目标,它将永远在那里。这种类型的目标被称为“吸收目标”。
想象一下,我们的agent是一个想象的虚拟机器人,可以通过经验学习。
agent可以从一个房间转移到另一个房间,但它没有上帝视角,也不知道哪一扇门通向外面。
按照第一部分Q学习的理论,我们把每个房间抽象为一个状态,选择进入哪号房间作为动作,把状态图和即时奖励值放到下面的奖励值表“回报矩阵R”中:-1表示不可选择的动作,两个状态间没有连接)
R = np.matrix([[-1, -1, -1, -1, 0, -1],
[-1, -1, -1, 0, -1, 100],
[-1, -1, -1, 0, -1, -1],
[-1, 0, 0, -1, 0, -1],
[ 0, -1, -1, 0, -1, 100],
[-1, 0, -1, -1, 0, 100]])现在我们将添加一个类似的矩阵“Q”给我们agent的大脑,代表了通过经验学到的东西的记忆。
矩阵Q的行表示agent的当前状态,列表示导致下一个状态的可能动作(节点之间的连线)。
agent开始什么都不知道,矩阵Q被初始化为零。
在这个例子中,为了解释简单,我们假设状态的数目是已知的(六个,0-5)。
如果我们不知道涉及多少个状态,矩阵Q可能从只有一个元素开始。
如果找到新的状态,则在矩阵Q中添加更多的列和行是一项简单的任务。
Q学习的更新规则如下:
![]()
根据这个公式,分配给矩阵Q的特定元素的值等于矩阵R中相应值加上学习参数γ乘以下一状态下所有可能动作的Q的最大值。
基于算法思想,训练Q矩阵的具体流程如下:
步骤1.初始化仓库环境和算法参数(最大训练周期数,每一场景即为一个周期,折扣因子γ,即时回报函数R和评估矩阵Q。)。
步骤2.随机选择一个初始状态s,若s=s*,则结束此场景,重新选择初始状态。
步骤3.在当前状态s的所有可能动作中随机选择一个动作a,选择每一动作的概率相等。
步骤4.当前状态s选取动作a后到达状态s’。
步骤5.使用公式对Q矩阵进行更新。
步骤6.设置下一状态为当前状态,s=s‘。若s未达到目标状态,则转步骤3。
步骤7.如果算法未达到最大训练周期数,转步骤2进入下一场景。否则结束训练,此时得到训练完毕的收敛Q矩阵。
上面的流程是给agent用来学习经验的。 每一场景都相当于一个培训课程。
在每个培训课程中, agent将探索环境 (由矩阵R表示), 接收奖励 (如果有),
直到达到目标状态。训练的目的是提高我们的agent的 “大脑”(矩阵 Q)。
场景越多,Q矩阵越优化。 在这种情况下, 如果矩阵 Q
得到了增强,四处探索时并不会在同一个房间进进出出,
agent将找到最快的路线到达目标状态。
参数γ的范围为0到1(0 \<= γ\< 1)。
如果γ接近零,agent将倾向于只考虑立即得到奖励值。
如果γ更接近1,那么agent将会考虑更多的权重,愿意延迟得到奖励。
一旦矩阵Q足够接近收敛状态,我们知道我们的agent已经学习了任意状态到达目标状态的最佳路径。
例如:
从初始状态2开始,agent可以使用矩阵Q作为指导,从状态2开始,最大Q值表示选择进入状态3的动作。
从状态3开始,最大Q值表示有两种并列最优选择:进入状态1或4。假设我们任意选择去1。
从状态1开始,最大Q值表示选择进入状态5的动作。
因此,最优策略是2 - 3 - 1 - 5。
我们使用Python为训练agent编写代码:
import numpy as np
import random
\# 初始化矩阵
Q = np.zeros((6, 6))
Q = np.matrix(Q)
def wan_find(list, col, list2):
col_max = 0
col_y = 0
col=col
\# a = np.linspace(0, 5, 5);
for i in [0, 1, 2, 3, 4, 5]:
if col_max \< list[i, col] and (i not in list2):
col_y = i
col_max = list[i, col]
return col_y, col_max
\# 回报矩阵R
R = np.matrix([[-1, -1, -1, -1, 0, -1],
[-1, -1, -1, 0, -1, 100],
[-1, -1, -1, 0, -1, -1],
[-1, 0, 0, -1, 0, -1],
[ 0, -1, -1, 0, -1, 100],
[-1, 0, -1, -1, 0, 100]])
\# 设立学习参数
γ = 0.8
\# 训练
for i in range(2000):
\# 对每一个训练,随机选择一种状态
state = random.randint(0, 5)
while True:
\# 选择当前状态下的所有可能动作
r_pos_action = []
for action in range(6):
if R[state, action] \>= 0:
r_pos_action.append(action)
next_state = r_pos_action[random.randint(0, len(r_pos_action) - 1)]
Q[state, next_state] = R[state, next_state] + γ \* (Q[next_state]).max() \# 更新
state = next_state
\# 状态4位最优库存状态
if state == 5:
break
Q1=np.zeros((6, 6))
Q1=Q/Q.max();
print(Q1)
\#frist_place = input("请输入在那个地方:")
\#while frist_place!=5 :
next_place = int(input('初始房间号'))
list2 = [next_place]
while next_place != 5:
next_place, value = wan_find(Q1, next_place, list2)
list2.append(next_place)
print(list2)
运行结果为:
[[0. 0. 0. 0. 0.8 0. ]
[0. 0. 0. 0.64 0. 1. ]
[0. 0. 0. 0.64 0. 0. ]
[0. 0.8 0.512 0. 0.8 0. ]
[0.64 0. 0. 0.64 0. 1. ]
[0. 0.8 0. 0. 0.8 1. ]]
初始房间号2
[2, 3, 1, 5]



